In this case study, we’ll be using the movement package to dive into mouse home cage monitoring data acquired in Smart-Kages and tracked with DeepLabCut. We’ll explore how mouse activity levels fluctuate throughout the day.
Before you get started, make sure you’ve set up the animals-in-motion-env environment (refer to prerequisites A.3.3) and are using it to run this code. You’ll also need to download the Smart-Kages.zip archive from Dropbox (see prerequisites A.4) and unzip it.
5.1 Import libraries
from pathlib import Pathimport matplotlib.pyplot as pltimport pandas as pdimport numpy as npimport xarray as xrfrom matplotlib import colormapsfrom movement import sample_datafrom movement.filtering import filter_by_confidence, rolling_filterfrom movement.kinematics import compute_speedfrom movement.plots import plot_occupancyfrom movement.roi import PolygonOfInterestfrom movement.transforms import scale
Downloading data from 'https://gin.g-node.org/neuroinformatics/movement-test-data/raw/master/metadata.yaml' to file '/home/runner/.movement/data/temp_metadata.yaml'.
SHA256 hash of downloaded file: 22100193c76c0e3f274e4c986357c95fc645da1f5c67af41a8acfa91313205f4
Use this value as the 'known_hash' argument of 'pooch.retrieve' to ensure that the file hasn't changed if it is downloaded again in the future.
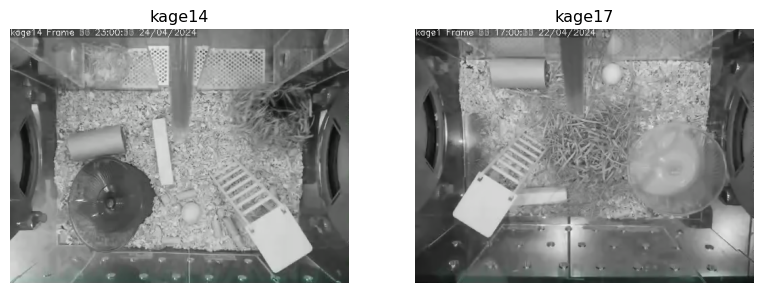
The Smart-Kages dataset comprises home cage recordings from two mice, each housed in a specialised Smart-Kage(Ho et al. 2023)—a home cage monitoring system equipped with a camera mounted atop the cage.
The camera captures data around the clock at a rate of 2 frames per second, saving a video segment for each hour of the day. A pre-trained DeepLabCut model is then used to predict 8 keypoints on the mouse’s body.
Let’s examine the contents of the downloaded data. You will need to specify the path to the unzipped Smart-Kages folder on your machine.
# Replace with the path to the unzipped Smart-Kages folder on your machinesmart_kages_path = Path.home() /".movement"/"Smart-Kages"# Let's visualise the contents of the folderfiles = [f.name for f in smart_kages_path.iterdir()]files.sort()forfilein files:print(file)
The tracking data are stored in two.nc (netCDF) files: kage14 and kage17. netCDF is an HDF5-based file format that can be natively saved/loaded by the xarray library, and is therefore convenient to use with movement.
Apart from these, we also have two .png files: kage14_background.png and kage17_background.png, which constitute frames extracted from the videos.
Let’s take a look at them.
Code
kages = ["kage14", "kage17"]img_paths = [smart_kages_path /f"{kage}_background.png"for kage in kages]images = [plt.imread(img_path) for img_path in img_paths]fig, axes = plt.subplots(nrows=1, ncols=2, figsize=(8, 4))for i, img inenumerate(images): axes[i].imshow(img) axes[i].set_title(f"{kages[i]}") axes[i].axis("off")
Figure 5.1: Top-down camera views of the Smart-Kage habitats
TipQuestions A
What objects do you see in the habitat?
What challenges do you anticipate with tracking a mouse in this environment?
What are the trade-offs one has to consider when designing a continuous monitoring system?
Let’s load and inspect the tracking data:
ds_kages = {} # a dictionary to store kage name -> xarray datasetfor kage in ["kage14", "kage17"]: ds_kages[kage] = xr.open_dataset(smart_kages_path /f"{kage}.nc")ds_kages["kage14"] # Change to "kage17" to inspect the other dataset
We see that each dataset contains a huge amount of data, but the two datasets are not exactly aligned in time.
Code
start_times = { name: pd.Timestamp(ds.time.isel(time=0).values)for name, ds in ds_kages.items()}end_times = { name: pd.Timestamp(ds.time.isel(time=-1).values)for name, ds in ds_kages.items()}for name in start_times.keys():print(f"{name}: from {start_times[name]} to {end_times[name]}")
kage14: from 2024-04-08 13:55:40 to 2024-05-10 07:59:59.501205
kage17: from 2024-04-03 00:00:06 to 2024-05-10 07:59:59.509103
5.3 Datetime Coordinates
You might notice something interesting about the time coordinates in these xarray datasets: they’re given in datetime64[ns] format, which means they’re precise timestamps expressed in “calendar time”.
This is different from what we’ve seen before in other movement datasets, where time coordinates are expressed as seconds elapsed since the start of the video, or “elapsed time”.
NoteHow did we get these timestamps?
Some recording systems can output timestamps for each video frame. In our case, the raw data from the Smart-Kage system included the start datetime of each 1-hour-long video segment and the precise time difference between the start of each segment and every frame within it.
Using this information, we were able to reconstruct precise datetime coordinates for all frames throughout the entire experiment. We then concatenated the DeepLabCut predictions from all video segments and assigned the datetime coordinates to the resulting dataset. If you’re interested in the details, you can find the code in the smart-kages-movement GitHub repository.
Using “calendar time” is convenient for many applications. For example, we could cross-reference the tracking results against other data sources, such as body weight measurements.
It also allows us to easily select time windows by datetime. We will leverage this here to select a time window that’s common to both kages. Note that we discard the last few days because the experimenter introduced some interventions during that time, which are out of scope for this case study.
Beyond this ability to select time windows by date and time, we will see many other benefits of using datetime coordinates in the rest of this case study.
That said, it’s still useful to also know the total time elapsed since the start of the experiment. In fact, many movement functions will expect “elapsed time” and may not work with datetime coordinates (for now).
Luckily, it’s easy to convert datetime coordinates to “elapsed time” by simply subtracting the start datetime of the whole experiment from each timestamp.
Expand to see how this can be done
ds_14 = ds_kages["kage14"]# Get the start datetime the experiment in kage14experiment_start = ds_14.time.isel(time=0).data# Subtract the start datetime from each timestamptime_elapsed = (ds_14.time.data - np.datetime64(experiment_start))# Convert to secondsseconds_elapsed = time_elapsed / pd.Timedelta("1s")# Assign the seconds_elapsed coordinate to the "time" dimensionds_14 = ds_14.assign_coords(seconds_elapsed=("time", seconds_elapsed))
We’ve pre-computed this for convenience and stored it in a secondary time coordinate called seconds_elapsed.
Whenever we want to switch to “elapsed time” mode, we can simply set the seconds_elapsed coordinates as the “index” of the time dimension. This means that seconds_elapsed will be used as the primary time coordinate, allowing us to select data by it.
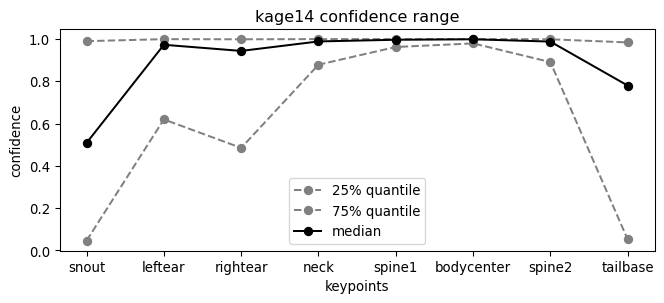
It looks like the “neck”, “bodycenter”, “spine1”, and “spine2” keypoints are the most confidently detected. Let us define a list of “reliable” keypoints for later use. These are all on the mouse’s body.
Let’s define a single-point representation of the mouse’s position, which we’ll call the body_centroid. We derive this by taking the mean of the 4 reliable keypoints, using their smoothed positions.
for kage, ds in ds_kages.items(): ds["body_centroid"] = ds.position_filtered.sel( individuals="individual_0", # the only individual in the dataset keypoints=reliable_keypoints ).mean(dim="keypoints")
Next, we’ll compute the body centroid’s speed in cm/sec via the following steps:
Convert the body centroid position data to cm units using scale().
Temporarily switch to “elapsed time” mode, because compute_speed() does not (yet) support datetime coordinates.
Compute the speed in cm/sec
Restore the original datetime coordinates to the speed data.
PIXELS_PER_CM =10for kage, ds in ds_kages.items():# Scale from pixels to cm using a known conversion factor body_centroid_cm = scale( ds.body_centroid, factor=1/ PIXELS_PER_CM, space_unit="cm" )# Compute the speed in cm/sec ds["body_centroid_speed"] = compute_speed( body_centroid_cm.set_index(time="seconds_elapsed") # switch time coords ).assign_coords(time=body_centroid_cm.time) # restore datetimeds_kages["kage14"].body_centroid_speed
<xarray.DataArray 'body_centroid_speed' (time: 4600675)> Size: 37MB
nan nan 0.05137 0.001921 0.02156 ... 0.01652 0.0186 0.02228 0.01102 0.03168
Coordinates: (2)
xarray.DataArray
'body_centroid_speed'
time: 4600675
nan nan 0.05137 0.001921 0.02156 ... 0.0186 0.02228 0.01102 0.03168
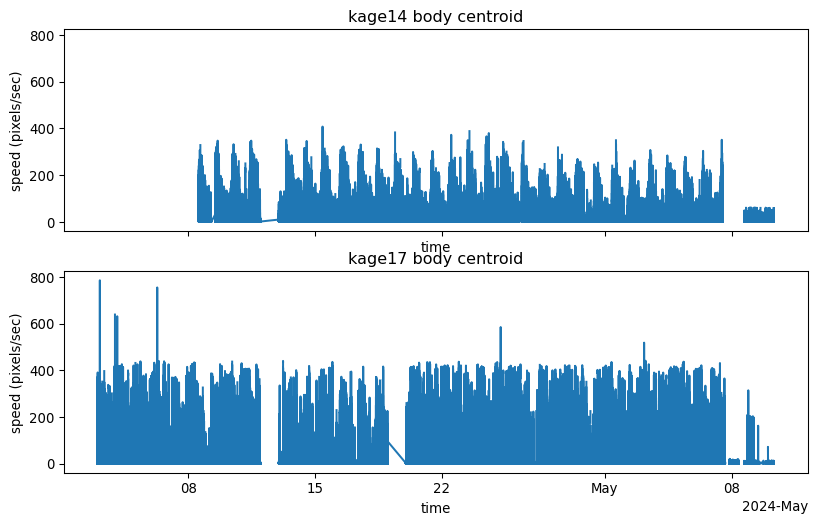
fig, axes = plt.subplots( nrows=2, ncols=1, figsize=(8, 5), sharex=True, sharey=True)for i, kage inenumerate(["kage14", "kage17"]): ds_kages[kage].body_centroid_speed.plot.line(ax=axes[i]) axes[i].set_title(f"{kage} body centroid") axes[i].set_ylabel("speed (cm/sec)")plt.tight_layout()plt.show()
Figure 5.3: Body centroid speed
TipQuestions B
What are potential sources of error in the speed calculation?
What do you notice about the overall speed fluctuations over time? What do you think is the reason for this?
Do you notice any differences between the two kages? Feel free to “zoom in” on specific time windows to investigate this.
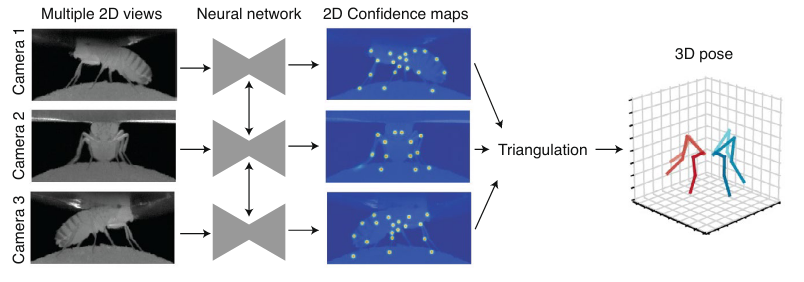
NoteA side-note on 3D pose estimation
With only a single top-down view of the mouse, we are limited to 2D pose estimation. This means the estimated keypoint coordinates are simply projections of the true 3D coordinates onto the 2D image plane.
This is the most common approach to pose estimation, but it cannot accurately measure true dimensions. Any conversion from pixels to physical units (e.g. centimetres) will be imprecise, and sometimes significantly so.
This limitation can be overcome by using multiple cameras from different viewpoints and performing 3D pose estimation. There are two main markerless approaches:
The first approach is to do ‘regular’ 2D pose estimation in each camera view, then triangulate across camera views to estimate 3D pose. The triangulation relies on known parameters about the cameras and their relative positions and orientations. Anipose(Karashchuk et al. 2021) is a popular open-source toolkit that implements this approach.
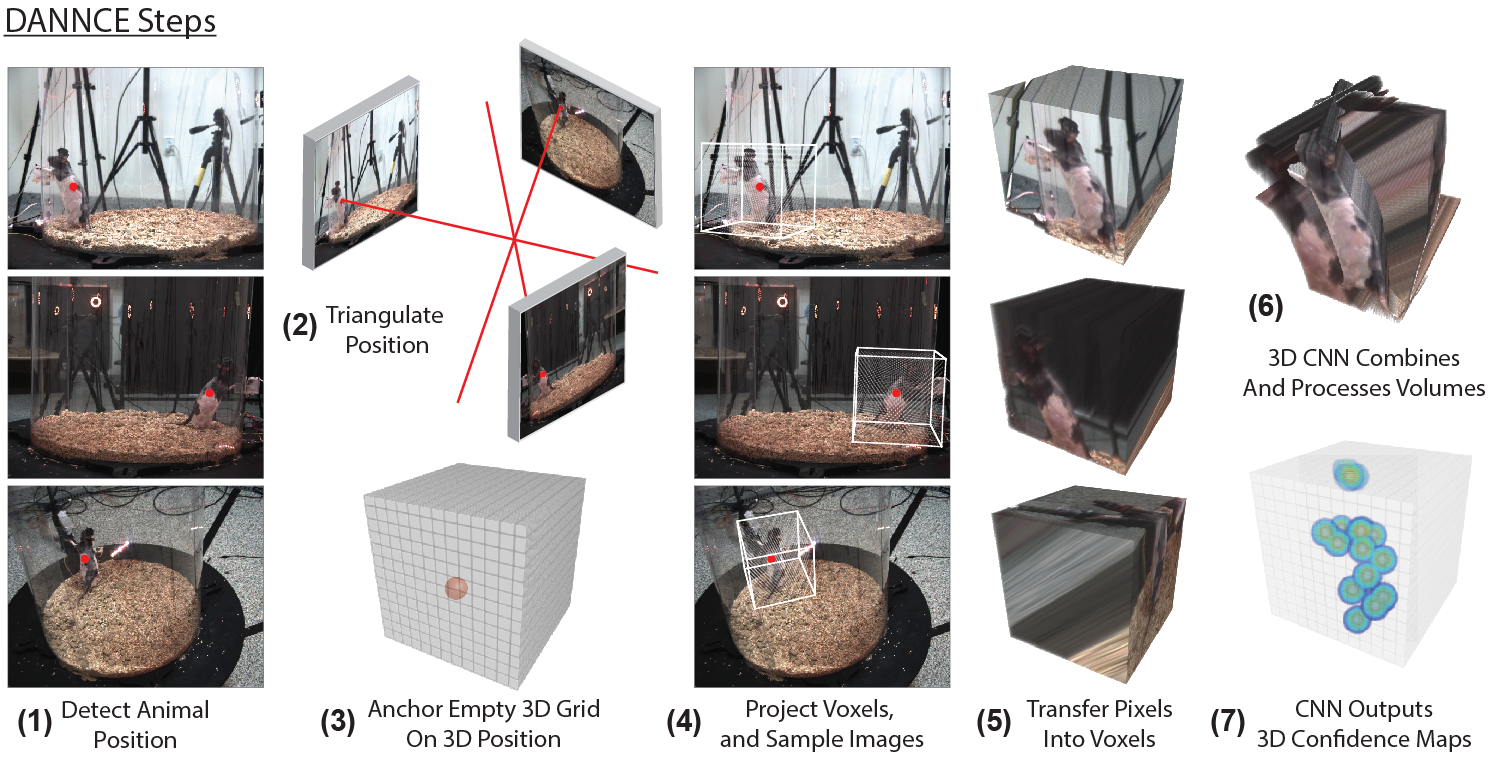
The second approach, implemented in DANNCE(Dunn et al. 2021), is to use a fully 3D convolutional neural network (CNN) that can learn about 3D image features and how cameras and landmarks relate to one another in 3D space.
What are the pros and cons of 2D vs 3D markerless pose estimation?
In which scenarios would you prefer one over the other?
5.6 Plot actograms
An actogram is a visualisation of the mouse’s activity level over time.
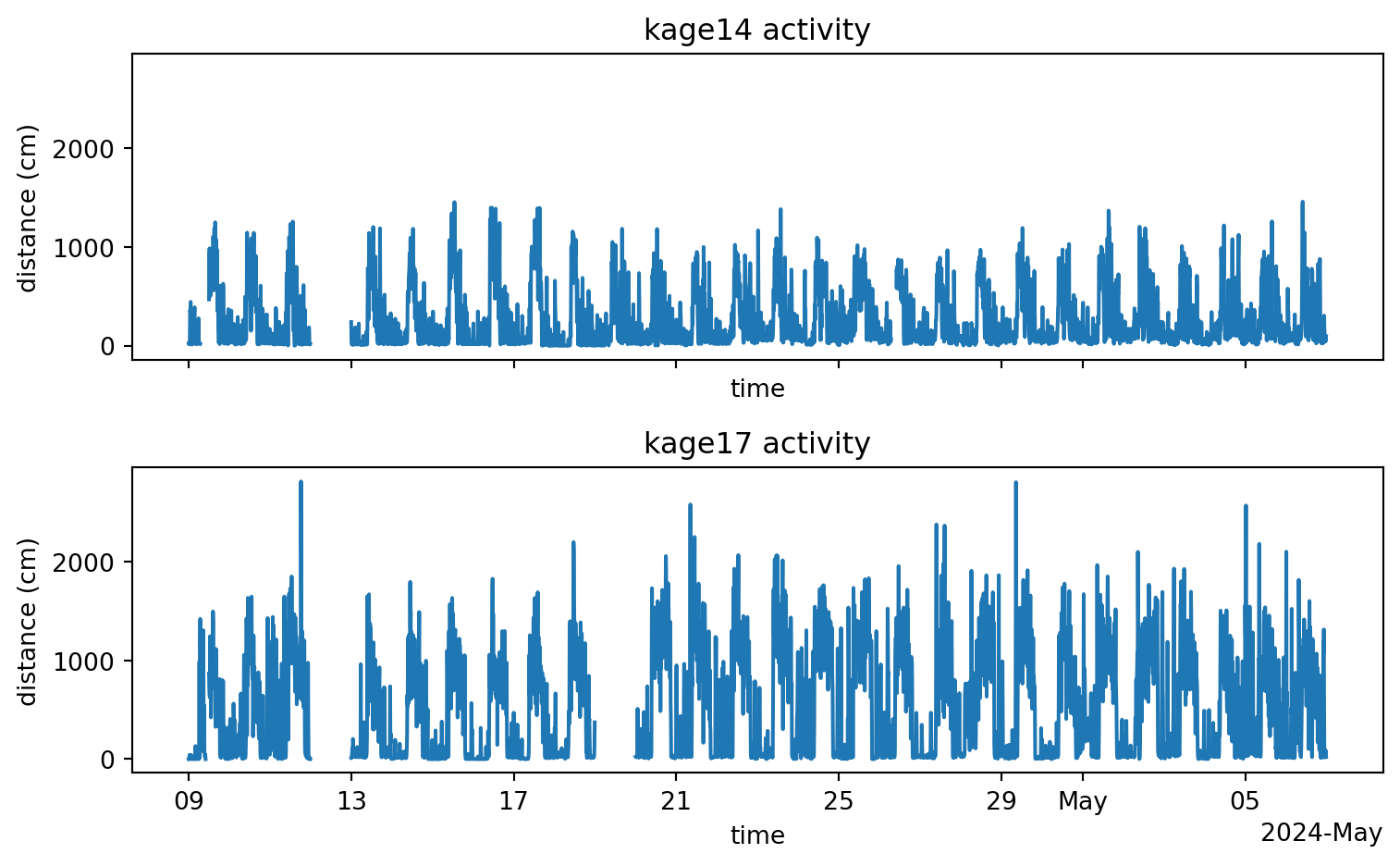
As a measure of activity we’ll use the cumulative distance traversed by the mouse’s body centroid in a given time bin—in this case, 10 minutes. Since we have already computed the speed (cm/sec), we can multiply that by the time bin duration in seconds to get the distance (cm).
for kage in ["kage14", "kage17"]: time_diff = ds_kages[kage].coords["seconds_elapsed"].diff(dim="time") ds_kages[kage]["distance"] = ds_kages[kage].body_centroid_speed * time_diff
Then we can sum the distance traversed in each time bin to get the activity level.
time_bin_minutes =10time_bin_duration = pd.Timedelta(f"{time_bin_minutes}min")fig, ax = plt.subplots( nrows=2, ncols=1, figsize=(8, 5), sharex=True, sharey=True)activity_dict = {} # Dictionary to store the activity levels for each kagefor i, kage inenumerate(["kage14", "kage17"]): activity = ds_kages[kage].distance.resample(time=time_bin_duration).sum() activity.plot.line(ax=ax[i]) ax[i].set_title(f"{kage} activity") ax[i].set_ylabel("distance (cm)") ax[i].set_xlabel("time") activity_dict[kage] = activityplt.tight_layout()plt.show()
Figure 5.4: Activity over time
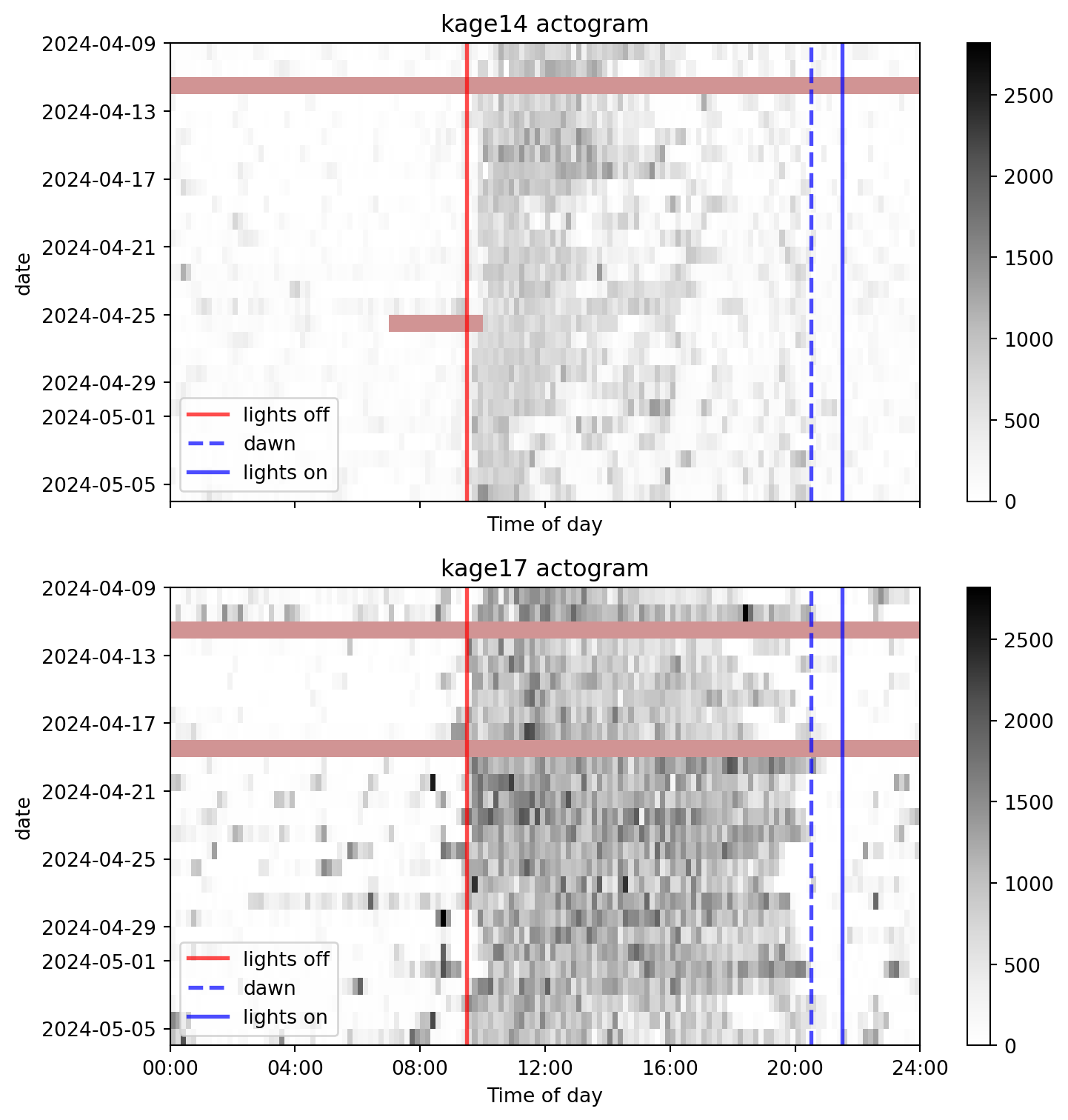
To make any circadian patterns more apparent, we will stack days vertically and indicate the light cycle with gray areas. For this particular experiment, the light cycle is as follows:
lights off at 9:30
dawn at 20:30
lights on at 21:30
# Define light cycle (in minutes since midnight)lights_off =9*60+30# 9:30 AM in minutesdawn =20*60+30# 8:30 PM in minutes lights_on =21*60+30# 9:30 PM in minutesn_bins_in_day =int(24*60/ time_bin_minutes)actogram_dict = {} # Dictionary to store the 2D actogram for each kagefor i, kage inenumerate(["kage14", "kage17"]): activity = activity_dict[kage] days =list(activity.groupby("time.date").groups.keys())# Create an empty 2D actogram with dims (date, time_bin) actogram = xr.DataArray( np.zeros((len(days), n_bins_in_day)), dims=["date", "time_of_day"], coords={"date": days,"time_of_day": np.arange( time_bin_minutes/2, 24*60, time_bin_minutes ) }, )# Populate 2D actogram per dayfor date, day_activity in activity.groupby("time.date"): actogram.loc[dict(date=date)] = day_activity.values# Store the actogram in the dictionary for later use actogram_dict[kage] = actogramactogram_dict["kage14"] # Replace with kage17 to see the actogram for kage17
Let’s now visualise the actograms, with the light cycle marked.
Code
max_activity =max( actogram_dict[kage].max().values for kage in ["kage14", "kage17"])fig, axes = plt.subplots( nrows=2, ncols=1, figsize=(8, 8), sharex=True, sharey=True,)for i, kage inenumerate(["kage14", "kage17"]): actogram = actogram_dict[kage]# Create a colormap for the actogram cmap = colormaps.get_cmap("Greys") cmap.set_bad(color="brown", alpha=0.5) # Set bad values to red# Plot the actogram ax = axes[i] actogram.plot( ax=ax, yincrease=False, vmin=0, vmax=max_activity, cmap=cmap )# Assign x-tick labels every 4 hours formatted as HH:MM ax.set_xticks(np.arange(0, 24*60+1, 4*60)) ax.set_xticklabels([f"{i:02d}:00"for i in np.arange(0, 25, 4)])# Mark light cycle ax.axvline(lights_off, color="red", alpha=0.7, lw=2, linestyle="-", label="lights off") ax.axvline(dawn, color="blue", alpha=0.7, lw=2, linestyle="--", label="dawn") ax.axvline(lights_on, color="blue", alpha=0.7, lw=2, linestyle="-", label="lights on") ax.legend(loc="lower left")# Set title and axis labels ax.set_title(f"{kage} actogram") ax.set_xlabel("Time of day")plt.tight_layout()plt.show()
Figure 5.5: Actograms
TipExercise C
How would you describe the observed differences between the two mice?
Compute the mean activity profile (across days) for each mouse.
Plot the mean activity profile for each mouse, with the light cycle marked.
Hint: Start with the actogram_dict dictionary and also make use of the lights_off and lights_on variables defined above.
NoteWhat underlies the differences in activity?
The mouse in kage17 is a genetically modified model of Down Syndrome. The syndrome, also known as trisomy 21, is caused in humans by the presence of all or part of a third copy of chromosome 21. The mouse in kage17 is genetically modified with a triplication of mouse chromosome 16, which carries about 150 genes homologues to the human chromosome 21.
Loukia is currently investigating why this particular mouse model exhibits a “restless” behavioural phenotype.
5.7 Space occupancy
Apart from quantifying how active the mice were over time, we might also be interested in which parts of the habitat they tend to frequent.
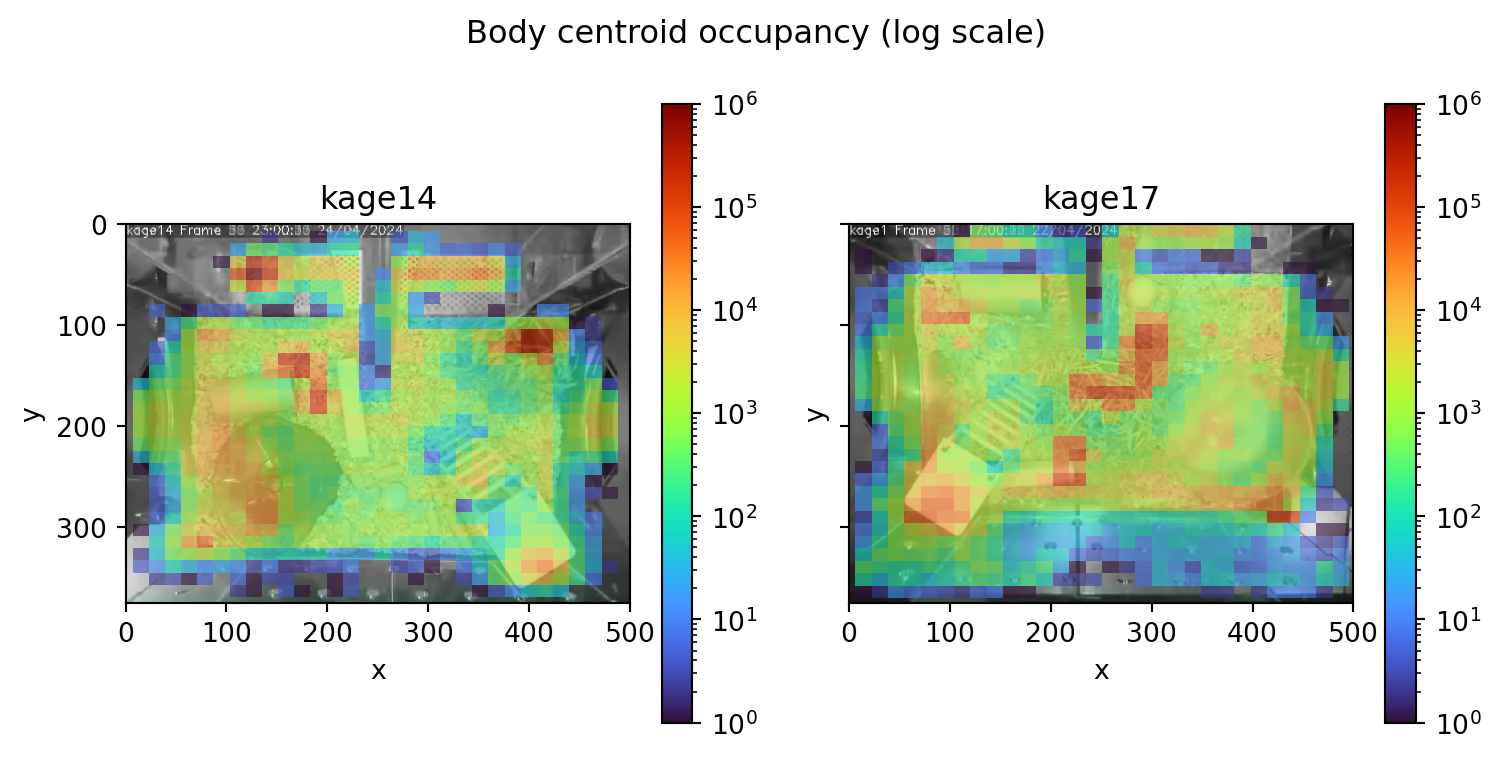
movement provides a plot_occupancy() function to help us visualise the space occupancy.
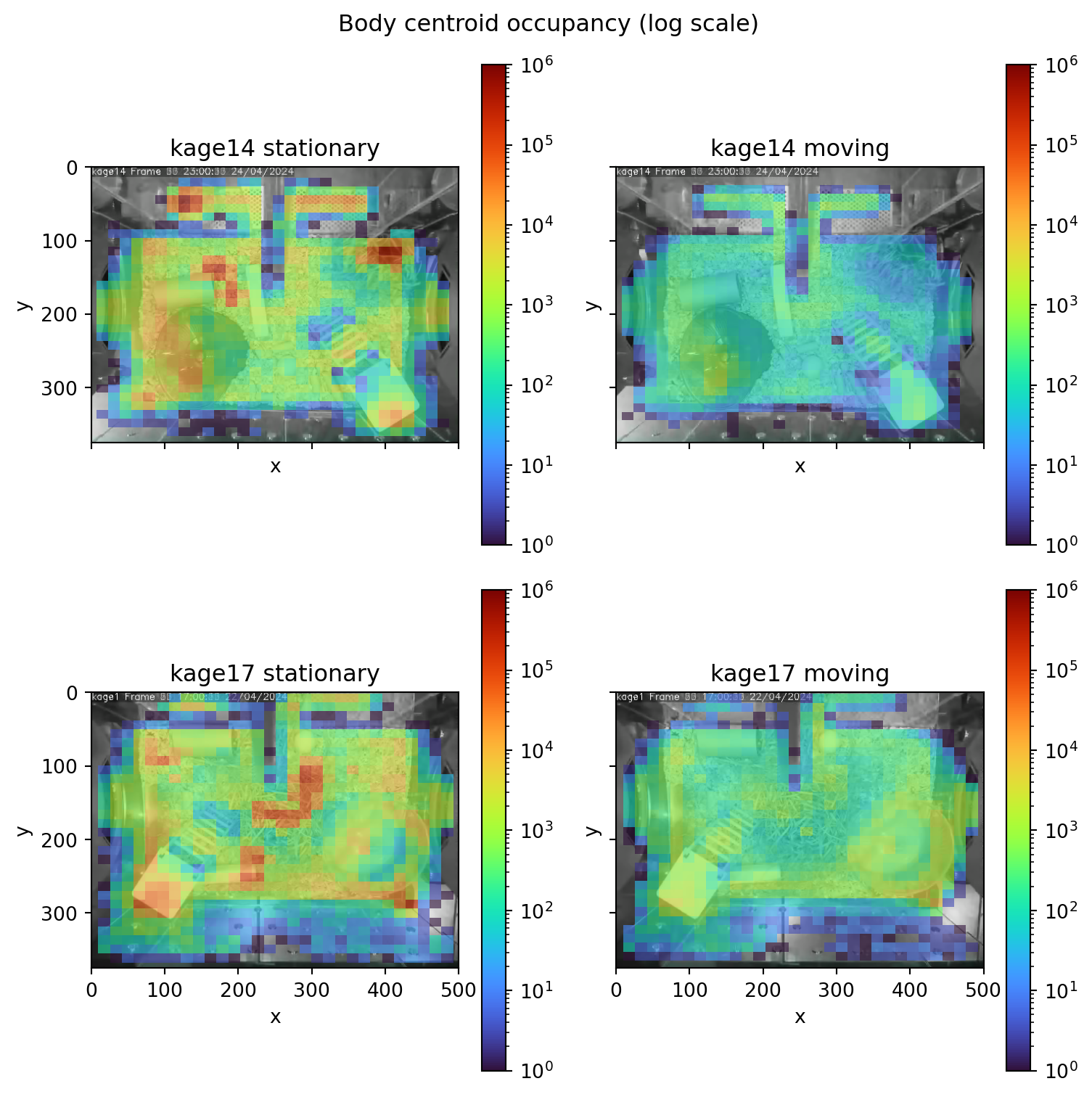
fig, axes = plt.subplots( nrows=1, ncols=2, figsize=(8, 4), sharex=True, sharey=True)plt.suptitle("Body centroid occupancy (log scale)")for i, kage inenumerate(["kage14", "kage17"]): img = images[i] height, width = img.shape[:2] axes[i].imshow(img) plot_occupancy(# Setting the time coordinates to "elapsed time" is necessary# for the log scale to work properly. ds_kages[kage].body_centroid.set_index(time="seconds_elapsed"), ax=axes[i], cmap="turbo", norm="log", # log scale the colormap vmax=10**6, alpha=0.6, # some transparency )# Make axes match the image dimensions axes[i].set_ylim([height -1, 0]) axes[i].set_xlim([0, width]) axes[i].set_title(kage)plt.tight_layout()plt.show()
Figure 5.6: Occupancy heatmaps
We see some clear hotspots, such as the nest and climbing platform. But not all hotspots are created equal. For example, the nest should be occupied when the mouse is stationary but not when it is moving.
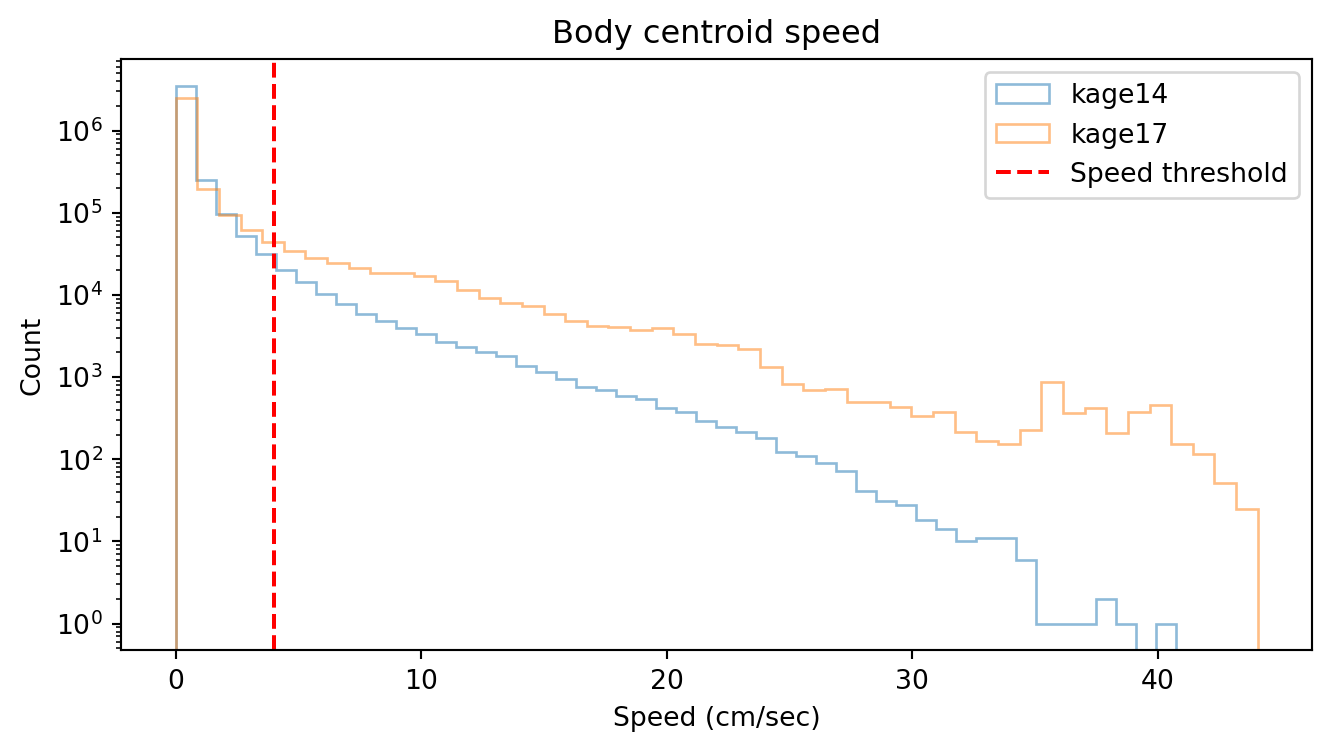
To investigate this, let’s choose an arbitrary speed limit of 4 cm/sec, below which we consider the mouse to be stationary.
Figure 5.7: Body centroid speed histogram (log scale)
Note
We use the log scale because speeds tend to be exponentially distributed, i.e. the mouse spends far more time at low speeds than at high speeds. Try commenting out the ax.set_yscale("log") line and see what happens.
We will generate separate occupancy heatmaps for when the mouse is stationary vs moving. We can do this by masking with where().
We see that the where() method returns a new xarray.DataArray with the same dimensions as the original, but with the data values replaced by NaN where the condition (mask) is False.
Using this approach we can generate separate the body centroid position arrays into states where the mouse is stationary vs moving, and then plot the occupancy heatmaps for each state.
Figure 5.8: Occupancy heatmaps (stationary vs active)
We see some expected patterns like the nest being a “hotspot” during stationary periods, and going “dark” during active periods. But we also see some puzzling patterns: for example, the running wheel is occupied during both periods, including when the mouse is “stationary”.
Is that because the mouse appears to be stationary to the camera as it’s running “in-place” on the wheel (like on a treadmill)? Or maybe the mouse spends some of its downtime resting on the wheel?
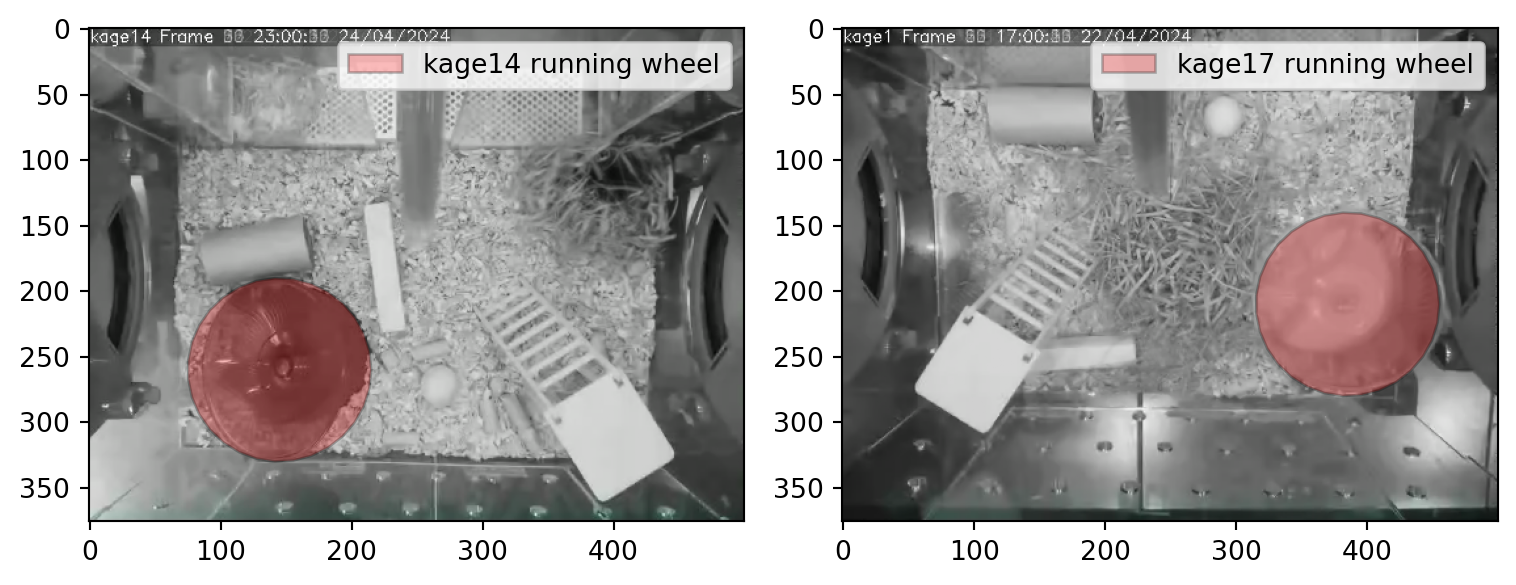
Let us create a circular “running wheel” ROI for each of the two kages.
centres = {"kage14": np.array([145, 260]), # (x, y)"kage17": np.array([385, 210]),}radius =70# Create a unit circlen_points =32angles = np.linspace(0, 2* np.pi, n_points)unit_circle = np.column_stack([np.cos(angles), np.sin(angles)])# Create ROIs by scaling and shifting the unit circlerois = {}for kage in ["kage14", "kage17"]: points = centres[kage] + radius * unit_circle roi = PolygonOfInterest(points, name=f"{kage} running wheel") rois[kage] = roi
Note
Admittedly, this is not the most precise or convenient way to define the running wheel ROI. It would be better to directly draw shapes on the video frames.
We are actively working on a widget in napari that will enable this. Stay tuned for updates in movement by joining the “movement” channel on Zulip.
Now that we have the ROIs defined as PolygonOfInterest objects, we can use some of their built-in methods.
For example, we can use .plot() to visualise the ROIs and verify that they are roughly in the right place.
We can also use .contains_point() to check if a point is inside the ROI. If we pass it a whole xarray.DataArray of points positions, e.g. the positions of the mouse’s body centroid over time, the check is performed for each point in the array.
Warning
The following code cell will take a while to run, probably a few minutes. That’s because we have a large amount of data and the .contains_point() method is not fully optimised yet.
If you are an experienced Python programmer this could be a cool project for the hackday.
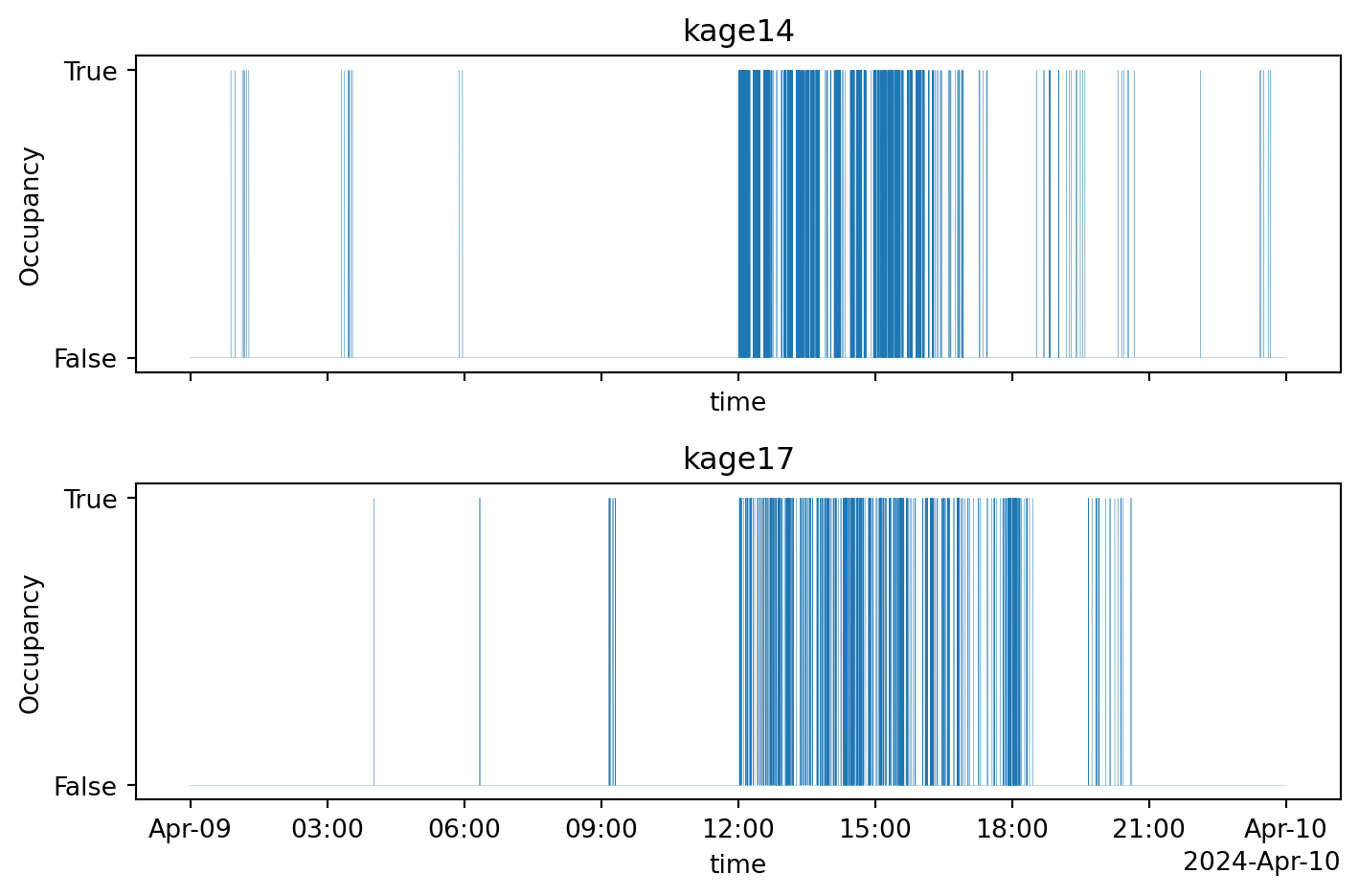
roi_occupancy = { kage: rois[kage].contains_point(ds_kages[kage].body_centroid)for kage in ["kage14", "kage17"]}roi_occupancy["kage14"]
The ROI occupancy data is a boolean array which is True when a point (in this case the mouse’s body centroid at each time point) is inside the ROI, and False otherwise.
Figure 5.10: Running wheel occupancy during April 9, 2024
We can also compute the % of time the mouse spends on the running wheel.
for kage in ["kage14", "kage17"]:# Count the ratio of True values in the array on_wheel_ratio = roi_occupancy[kage].mean(dim="time").values# Convert to percentage pct_on_wheel =float(100* on_wheel_ratio)print(f"{kage} spends {pct_on_wheel:.1f}% of its time on the running wheel")
kage14 spends 7.7% of its time on the running wheel
kage17 spends 5.6% of its time on the running wheel
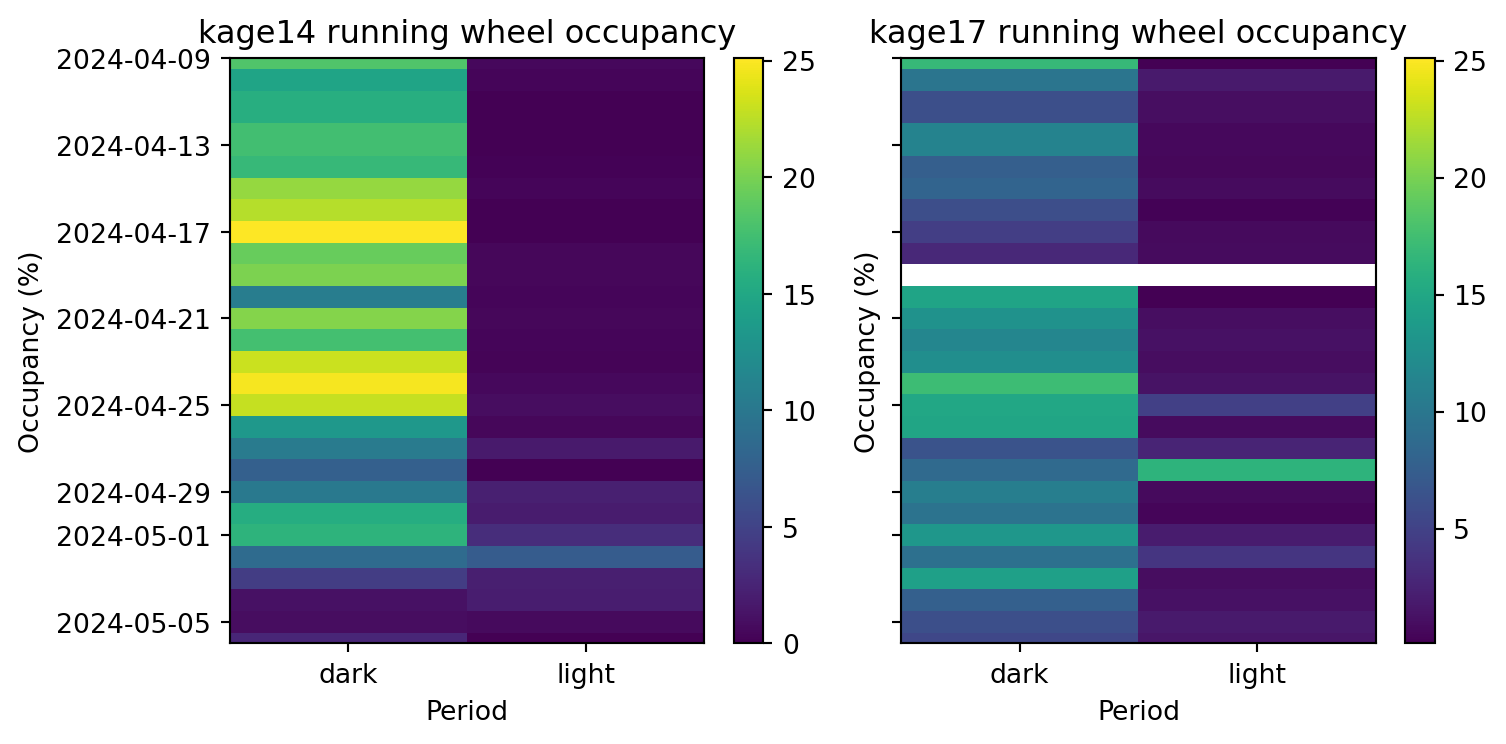
But how does the running wheel occupancy relate to the light cycle? We can segment the ROI occupancy data into dark and light periods for each day and compute the % of time spent on the running wheel during each period.
Figure 5.11: Running wheel occupancy during light and dark periods
As we would expect, both mice tend to spend more time on the running wheel during the dark (active) periods.
Even though the mouse in kage17 is more active overall, as we saw in Section 5.6, it spends less time on the running wheel compared to the mouse in kage14.
Dunn, Timothy W., Jesse D. Marshall, Kyle S. Severson, Diego E. Aldarondo, David G. C. Hildebrand, Selmaan N. Chettih, William L. Wang, et al. 2021. “Geometric Deep Learning Enables 3D Kinematic Profiling Across Species and Environments.”Nature Methods 18 (5): 564–73. https://doi.org/10.1038/s41592-021-01106-6.
Ho, Hinze, Nejc Kejzar, Hiroki Sasaguri, Takashi Saito, Takaomi C. Saido, Bart De Strooper, Marius Bauza, and Julija Krupic. 2023. “A Fully Automated Home Cage for Long-Term Continuous Phenotyping of Mouse Cognition and Behavior.”Cell Reports Methods 3 (7): 100532. https://doi.org/10.1016/j.crmeth.2023.100532.
Karashchuk, Pierre, Katie L. Rupp, Evyn S. Dickinson, Sarah Walling-Bell, Elischa Sanders, Eiman Azim, Bingni W. Brunton, and John C. Tuthill. 2021. “Anipose: A Toolkit for Robust Markerless 3D Pose Estimation.”Cell Reports 36 (13): 109730. https://doi.org/10.1016/j.celrep.2021.109730.
Pereira, Talmo D., Joshua W. Shaevitz, and Mala Murthy. 2020. “Quantifying Behavior to Understand the Brain.”Nature Neuroscience 23 (12): 1537–49. https://doi.org/10.1038/s41593-020-00734-z.